Tokyo, Japan, October 25, 2011 – NSK Ltd. (NSK; Headquarters: Tokyo, Japan; President and CEO: Norio Otsuka) today announced that it has developed a guide robot that combines newly developed external recognition and obstacle avoidance technology with attitude controls for reduced blind spots and increased stability.
Global
Asia
ASEAN and Oceania
Americas
Europe
Middle East
Africa
Press Release
NSK Develops a Lead-Robot with Obstacle Avoidance Capabilities
New Guide Robot Developed by Combining Robot Attitude Controls with Obstacle Avoidance Technology

NSK has developed a wheel-type robot equipped with a grip for sensing the direction the user wants to go while autonomously detecting obstacles along the path, over both flat and sloped terrain in such environments as office buildings, hospitals and commercial complexes. This product has realized a combination and unification of robot drive technology, recognition technology and robot-human interface technology. This technology has great future application potential as an alternative to wheelchairs, guide dogs and service dogs in the form of autonomous robots designed to assist people. NSK will exhibit this product at Tokyo Big Sight (located in Koto Ward in Tokyo) from Wednesday, November 9 to Saturday, November 12 at iREX 2011 (International Robot Exhibition). Visitors to the NSK booth will have the opportunity to experience the robot first hand and gain insight into the expanding needs of this market. NSK will be performing on-site verification in the actual market in order to confirm the practical use and safety of this product in the real world.
Product features

-
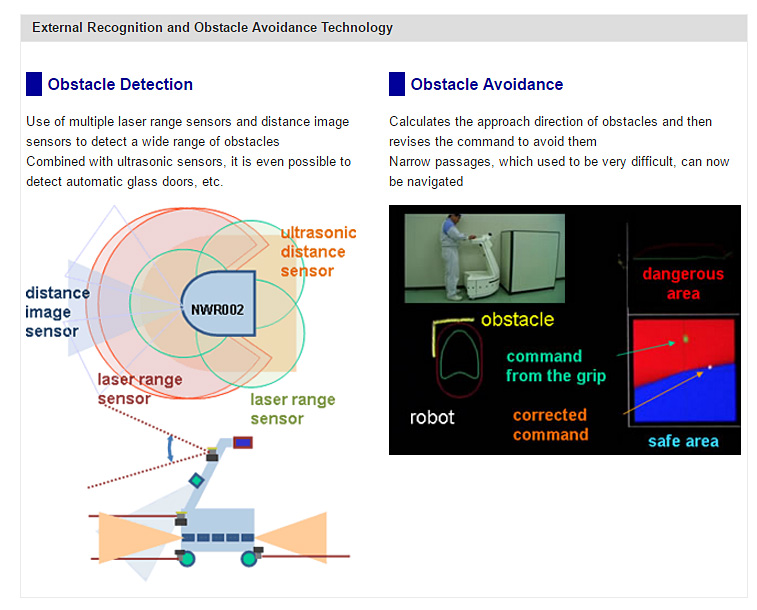
◆External recognition and obstacle avoidance
- NSK developed an algorithm that calculates a safe travel trajectory using the robot's direction and speed combined with the distance to obstacles acquired via sensor input. This makes it possible for the robot to guide the user through narrow passages, such as train station ticket gates.
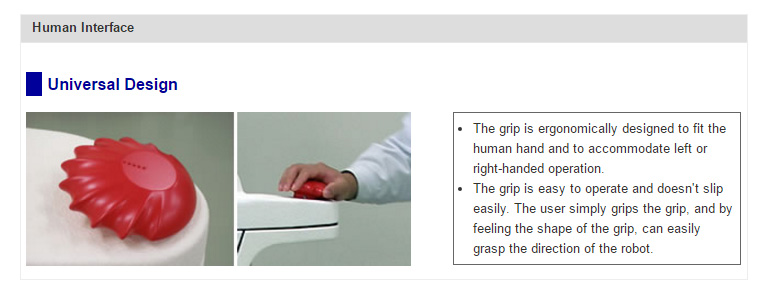
- ◆Guidance feature
- The robot is equipped with a grip that is easy to grip and operate with either the left or right hand. With this grip and the accommodating force sensor, users experience smooth operation as they are able to freely convey direction and speed.
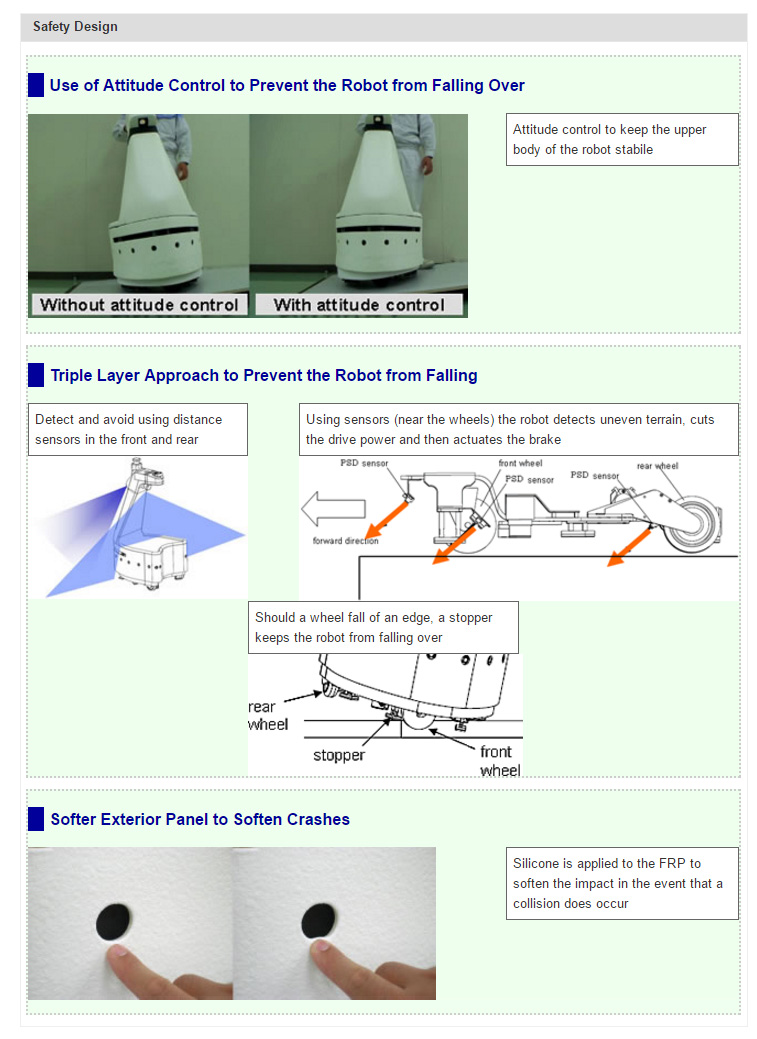
- ◆Improved safety
- An auto-attitude control device was implemented in order to prevent the robot from falling over on sloped terrain. A triple layer safety structure has been employed to prevent the robot from falling over. The robot is not only capable of treating the edges of uneven terrain as obstacles in order to prevent falling over on highly uneven terrain; it is also equipped with a sensor that enables safe stopping in the event that an error is generated by its controller. Furthermore, in the event that a wheel goes off the shoulder of a road, a mechanical stopper prevents the robot from falling over.
To date, NSK's involvement in robotics has been focused on the supply of such products as bearings, NSK linear guides™and ball screws. This new development was made possible through the integration of advanced mechatronic sensor technology with the machine fundamentals and component technology NSK has developed over the years. Through the development of robots designed for human-assistance, NSK will continue working to identify underlying issues in this field, engaging its four core technologies – tribology, materials, analysis and mechatronics – to create robotic solutions to real human needs.