日本精工株式会社(本社:東京都品川区、代表者:取締役 代表執行役社長 大塚 紀男、以下NSK)は、新開発の外界認識・障害物回避技術、姿勢制御技術を採用することで、死角を軽減し安全性を高めた歩行先導ロボットを開発しました。

今回、NSKが開発したロボットは、平地や傾斜面で構成されるオフィスビルや病院、商業施設等での移動が可能な車輪型移動ロボットであり、グリップを介して人の行きたい方向を察知し、進路上にある障害物を自律認識して回避しながら進みます。本開発品は、ロボットの駆動技術、認識技術及びロボットと人間の情報伝達(インターフェース)技術を組み合わせ、統合することで実現しました。本技術は将来的に、車椅子、盲導犬や介護犬の代用などへの応用が可能な、人間をアシストする自律移動ロボットへと繋がるものです。
NSKは、11月9日(水)から11月12日(土)まで、東京ビッグサイト(東京都江東区)にて開催される「2011国際ロボット展」に本開発品を出展し、会場で実際に体験いただき、広く市場でのニーズを探ります。今後、実用化に向け、安全性などの機能につき、市場での実地検証を行っていきます。
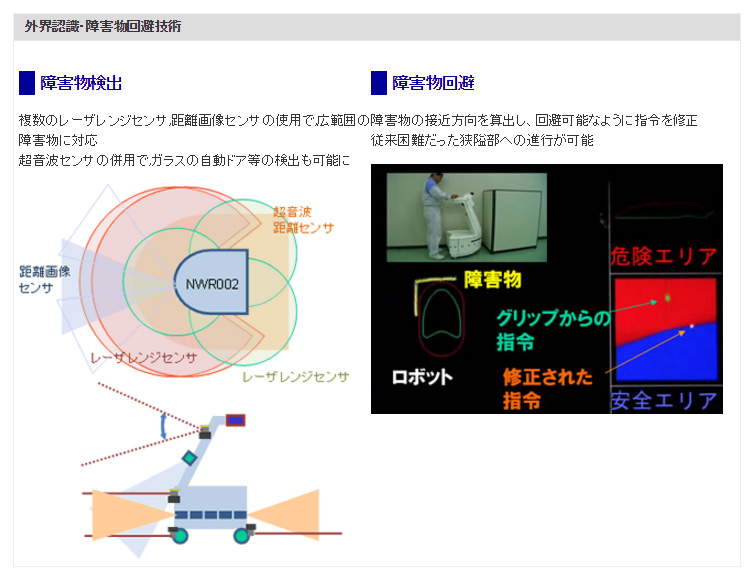
- ◆外界認識・障害物回避
- センサより得られた障害物までの距離情報とロボットの進行方向と速度から、走行軌道上の安全領域を算出するアルゴリズムを開発しました。これにより、改札などの狭い空間への誘導を実現しました。
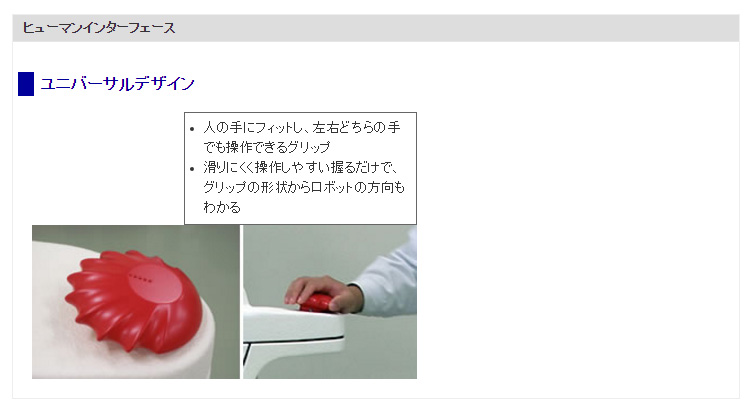
- ◆人へのガイダンス機能
- 左右どちらの手でも、握り易く、操作可能なグリップを考案しました。このグリップを介し、力覚センサにより進行方向と速度を思いのままに伝達でき、滑らかな動作を実現しました。
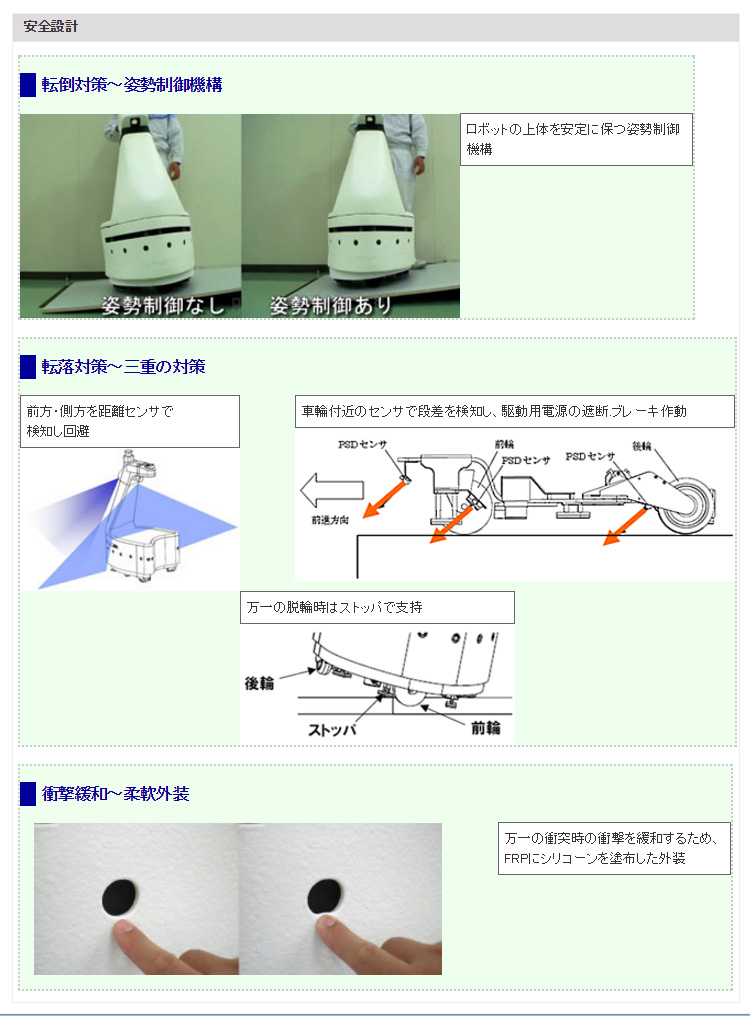
- ◆安全性の向上
- 傾斜面でのロボットの転倒を防止するため、ロボットの姿勢を垂直に維持する自動姿勢制御機構を採用しました。また、大きな段差部での転落を防止するため、段差のエッジを障害物とみなして回避するだけでなく、制御装置に異常がある場合でも安全に停止するためのセンサを内蔵し、さらに段差などで万が一脱輪した際には、機械式のストッパーで転落を回避する三重の安全構造としました。
NSKは、これまで軸受やNSKリニアガイド™、ボールねじなどの供給を通じてロボット技術に携わってきました。本開発品は、NSKが培った機械要素部品技術にメカトロニクスの高度なセンサ技術を統合することで、可能になりました。NSKは、これからもヒューマンアシストを目指したロボットの開発を通じて、この分野における潜在的な課題をいち早く捉え、NSKの持つトライボロジー、材料、解析、メカトロの4つのコアテクノロジーを活かすことで、ヒューマンアシストテクノロジーの発展に貢献していきます。