NSK Developing Outdoor Mobile Robot Platform; Smooth and Gentle Transport of Objects
Achieved a design ideal for outdoor use with a highly stable platform and autonomous navigation all packaged in a low-profile body
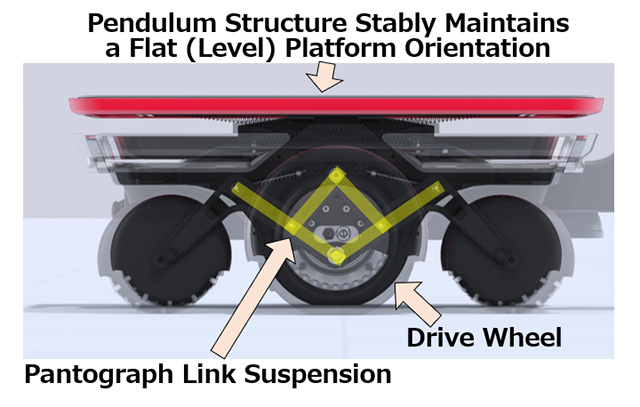
NSK Core Technologies take shape as original mechanisms such as a ‘pantograph link suspension system’ and a ‘pendulum structure’ that maintains the platform’s orientation (keeps the top surface steady and level) and reduces impact.
The robot can transport objects stably on uneven surfaces, enabling automated transport in outdoor environments where it has been difficult to introduce robots
NSK is currently developing an outdoor mobile robot platform ideal for service and transport robot applications. NSK’s robot packages together all the core functions required to transport objects and will enable the automation of transportation work in a wide range of industries including the service industry.
NSK will exhibit the robot platform at the 2023 International Robot Exhibition to be held at Tokyo Big Sight from November 29 to December 2, 2023.
Outdoor Mobile Robot Platform
Development Background
In the service industry and other industries, there is a growing need for automation of work including the transport of objects to improve human resource allocation, such as to bolster customer service, and to improve occupational health and safety.
However, the environments in which robots can operate are often limited, and there are infrastructure issues such as the difficulty of traveling on uneven road surfaces and slopes, and the instability of cargo objects depending on the road surface conditions. As a result, service robots have not been widely adopted.
Features
Utilizing NSK's core technologies we achieved a design ideal for outdoor use with a highly stable platform and autonomous navigation all packaged in a low-profile body.
1. Outdoor Use
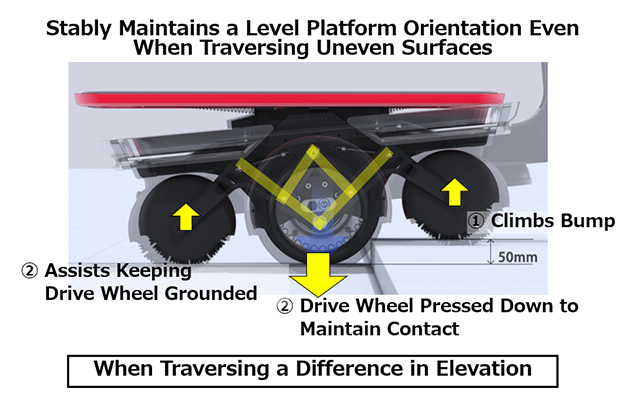
The three wheels on each side are equipped with NSK’s pantograph link suspension system (patent pending1) to keep the drive wheels fully grounded during operation. This makes the robot capable of traversing uneven road surfaces and over bumps or differences in elevation of up to 50 mm.
Direct-drive motors2 used for the drive wheels reduce friction and achieve quiet operation.
2. Highly Stable Platform – Highly Stable and Smooth Transport of Objects
NSK’s pendulum structure (patent pending) maintains the platform‘s orientation (keeps the top surface steady and level) when ascending and descending slopes of up to 10° and reduces vibrations. The mechanism also reduces the impact of the robot’s acceleration and deceleration on the objects being transported making it possible to transport delicate objects such as food and beverages.
The low-profile body (height of just 312mm) keeps the center of gravity low, and enhances stability when moving.
3. Autonomous Navigation
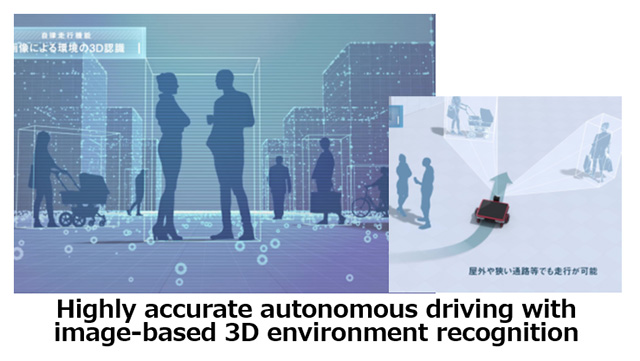
The robot platform uses 3D image recognition to navigate. It can recognize the environment more accurately than conventional 2D LiDAR recognition, enabling safe and accurate navigation outdoors and in narrow corridors.
Video
Future Goals
We aim to bring this product to market in 2025. Moving forward, we will analyze issues faced by service robot manufacturers and users, propose solutions using this robot platform, and begin pilot testing. We also plan to develop variations of the platform with different configurations of suspension and stability/vibration reducing units in order to meet the needs of different applications and use environments.
This product will help streamline on-site work by realizing robots that can transport delicate goods in diverse indoor and outdoor environments while coexisting alongside people. This will free people to focus on the creation of new value using the time saved. Moving forward, NSK will continue its efforts to analyze the needs of customers and the market to provide comprehensive and innovative solutions.
1 Joint application with Tokyo Metropolitan Industrial Technology Research Institute
2 A motor that directly drives a load without using gears or other reduction gears