NSK and German Aerospace Center Developing Highly Customizable Robotic Hand System
Individual finger modules that can be easily reconfigured according to use case
Easily automate manual work that requires grasping a wide variety of objects
Combines versatility and affordability with a focus on the service industry, enabling the creation of just-right solutions for customer needs
NSK Ltd. and the German Aerospace Center are developing a Robotic Hand System that will contribute to the automation of manual tasks especially in the service industry.
The concept proposes a versatile robot hand comprised of individual finger modules, a first in the industry1. By combining versatility and affordability, this product aims to contribute to the automation of manual work that requires grasping a wide variety of objects.
A working prototype was exhibited at the 2023 International Robot Exhibition at Tokyo Big Sight.
1 Based on our survey of available products
Finger Modules of the Robotic Hand System
Background
Many countries globally have aging populations causing serious labor shortages in many industries and the introduction of robots to take on manual work is posed as a key solution. However, the introduction of robots has not progressed in the retail, restaurant, and some manufacturing industries, especially for tasks that require manual dexterity.
A significant factor is that the price of robot hands that can grasp only a single type or size of object is low, while robot hands that can grasp a diverse range of objects are extremely expensive.
Overview
Against this background, we are developing a Robotic Hand System with finger modules that can be reconfigured according to use case. The individual finger modules enable robot hands to be constructed with the minimum configuration required to meet the customer's needs. It is easy to create a robot hand that grips only standardized products or a robot hand that grips a variety of objects.
By limiting production to individual finger modules, we aim to achieve a low unit cost through mass production.
Example Robotic Hand System Configurations
Features
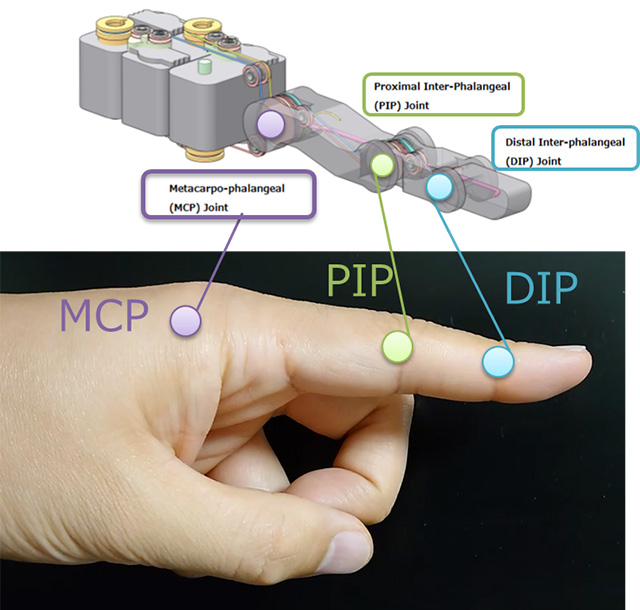
1. Smooth Finger Movement
Smooth motion and gentle gripping of diverse objects achieved through joint development applying the wire drive technology of the German Aerospace Center.
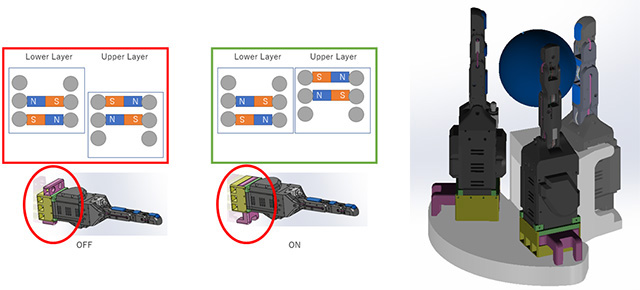
2. Easy Layout Change
NSK's proprietary detachable magnetic mechanism makes it easy to change the layout of finger modules simply by pulling a lever to attach or detach.
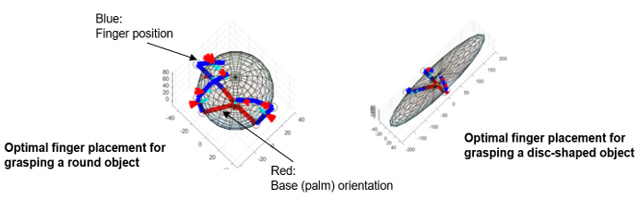
3. Finger Module Placement Optimization
Utilizing NSK Digital Twin technology, we developed an algorithm to optimize finger module placement according to the size and shape of the object.
Proposals to Robotic System Integrators and Future Goals
In order to contribute to mechanization and automation in a wide range of industries, including food service, retail, manufacturing, logistics, and agriculture, we be making solution proposals to robotic system integrators2 as well as customers with existing robot equipment in the coming months. We aim to start field tests in fiscal 2024, and launch the product in fiscal 2026.
2 A business that undertakes the design, development, operation, etc. of robotic IT systems.