Tokyo, Japan, October 25, 2011 – NSK Ltd. (NSK; Headquarters: Tokyo, Japan; President and CEO: Norio Otsuka) today announced that it has developed a four-legged, wheeled robot that utilizes a newly developed external recognition technology and guidance function to detect the position of stairs, autonomously recognize the shape of the stairs and then guide the user up and down staircases.
Global
Asia
ASEAN and Oceania
Americas
Europe
Middle East
Africa
Press Release
NSK Develops a Guide-Dog Style Robot
Autonomous External Recognition and Staircase Guidance Made Possible

The robot developed by NSK is a four legged, wheeled robot equipped with drive wheels on each of its legs and highly capable of maneuvering over flat and stepped terrain. It is also capable of autonomously recognizing stairs through the use of independent processing of external information detected through image and distance sensors, and then guiding the user up and down staircases. This technology resulted from the development of technology aimed at achieving an autonomous robot capable of assisting human eyesight. This technology has potential application as an alternative to wheelchairs, guide dogs and service dogs. NSK will exhibit this product at Tokyo Big Sight (located in the Koto Ward of Tokyo) from Wednesday, November 9 to Saturday, November 12 at iREX 2011 (International Robot Exhibition). Visitors to the NSK booth will have the opportunity to see a demo and gain insight into the expanding needs of the market. NSK will be performing on-site verification in the actual market in order to confirm the practical use and safety of this product in the real world.
Product features
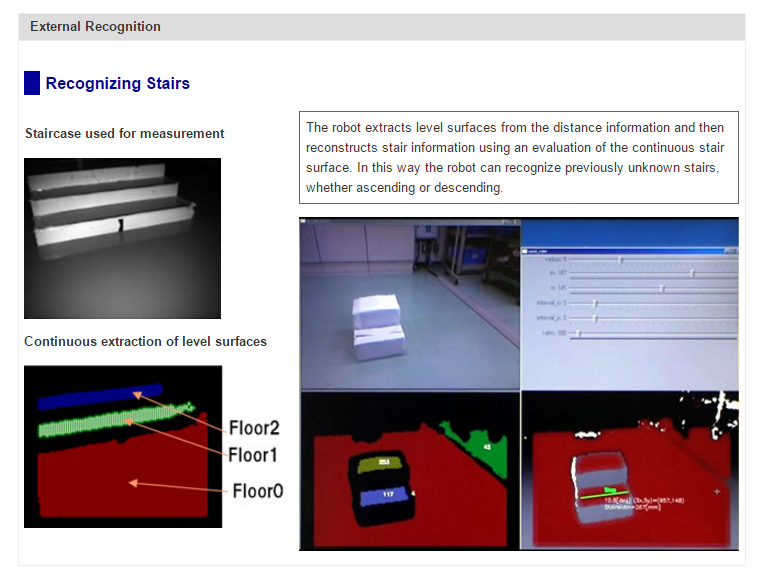
- ◆New algorithm for external recognition
- The robot converts information gained from the distance image sensor into 3D shape, position and attitude information so that it can recognize the width and number of stairs*1. Conventionally this was a very difficult challenge, but with this new algorithm the robot can recognize stairs while in motion for a safe and stable ascent and descent of staircases.
*1 The fundamental portion of this algorithm is the result of joint research with Chisato Kanamori, Associate Professor at the University of Electro-Communications.
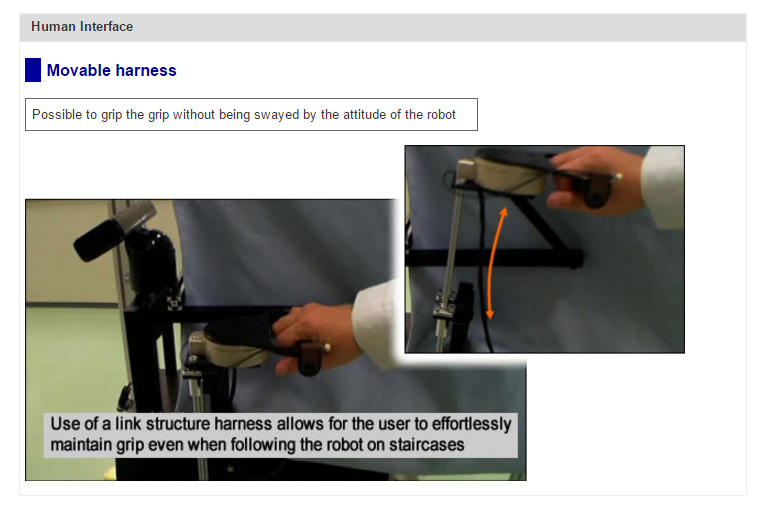
- ◆Easy to use guidance feature
- Through the use of a length- and angle-adjustable grip as an interface between the robot and the user, the robot is capable of providing stable guidance, even when descending a staircase. The robot is capable of moving at a speed almost as fast as human walking speed, bringing it closer to practical application.
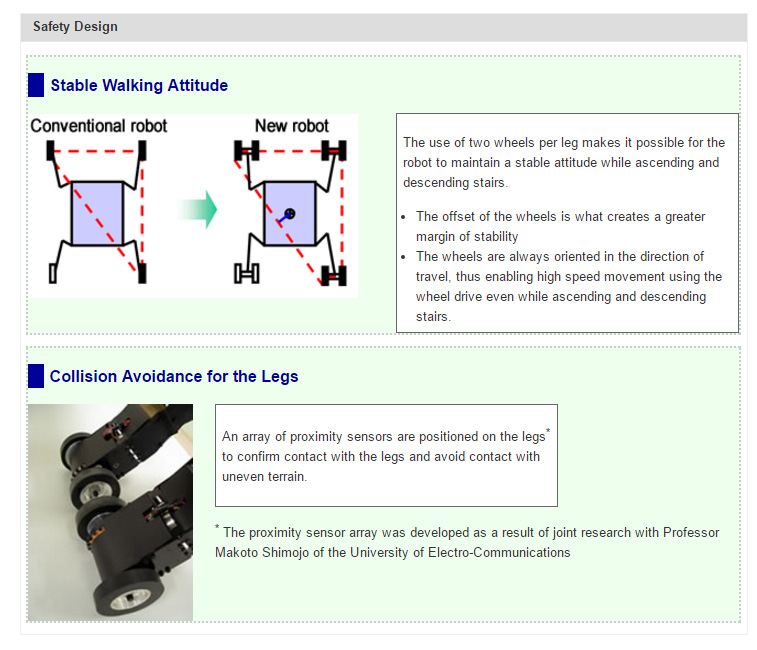
- ◆Safety when ascending and descending staircases
- The robot is capable of securely coming to a stop when its feet land as it is ascending and descending a staircase. It is equipped with a sensor*2 that limits contact with uneven terrain so as to ensure stable movement and safe guidance for the user.
*2 This sensor is the result of joint research with Makoto Shimojo, Professor at the University of Electro-Communications.
To date NSK's involvement in robotics has been focused on the supply of such products as bearings, NSK linear guides™ and ball screws. In 2007, NSK integrated advanced mechatronic sensor technology with the machine fundamental and component technology NSK had cultivated over the years to develop a robot guide dog capable of autonomous recognition of stairs and the ability to ascend and descend staircases. In this latest version of its robot guide dog, NSK has improved the external recognition, movement and drive functionality and performance, and has added guidance capability.
Through the development of robots designed for human-assistance, NSK will continue working to identify underlying issues in this field, engaging its four core technologies – tribology, materials, analysis and mechatronics – to create robotic solutions to real human needs.