- ユースケースに応じて組替可能なフィンガーモジュールの提案
- お客様のニーズに必要な最小構成のロボットハンドが構築可能
- 掴む対象が多種多様な人手作業の自動化に貢献
日本精工株式会社(本社:東京都品川区、代表者:取締役 代表執行役社長・CEO 市井 明俊、以下NSK)は、サービス業を中心とした人手作業の自動化に貢献するフィンガーモジュールの開発をドイツ航空宇宙センターとともに開始しました。フィンガーモジュールの組み合わせで汎用性の高いロボットハンドを提案するコンセプトは、業界初*1です。汎用性と価格を両立させることで、掴む対象が多種多様な人手作業の自動化に貢献します。本製品は、2023年11月29日(水)~12月2日(土)に東京ビッグサイトで開催される「2023国際ロボット展」に出展予定です。
*1 NSK調べ
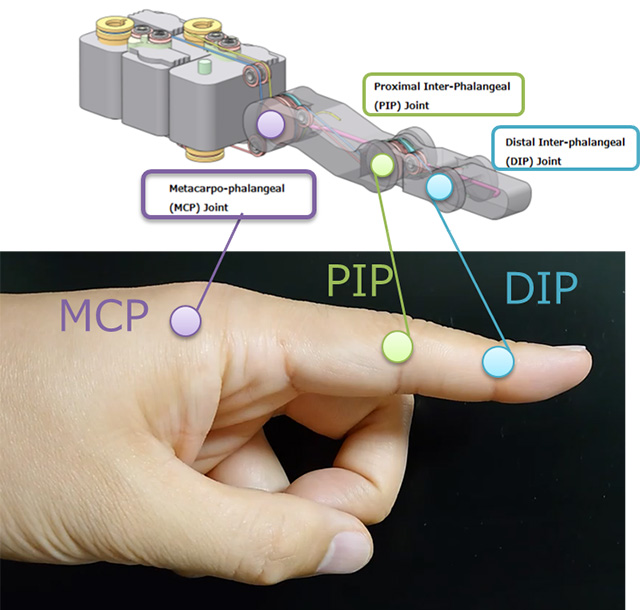
 フィンガーモジュール
フィンガーモジュール
開発の背景
高齢化社会の進行によりあらゆる産業で人材不足が深刻化し、解決策の1つとしてロボットの導入が注目されています。しかし、小売業・飲食業・製造業をはじめ、手先の器用さが必要な作業では、ロボットの導入が進んでいないのが現状です。
この背景としては、定型品のみ掴むことが可能なロボットハンドは価格が安い一方で、多様な対象物を掴めるロボットハンドは非常に高価、と二極化していることが挙げられます。
本開発品の概要
このような背景に対して、ユースケースに応じて組替可能なフィンガーモジュールを提案します。基本モジュールを複数組合せることで、定型品のみ掴むロボットハンドから多様な対象物を掴むロボットハンドまで、お客様のニーズに合わせて最小構成のロボットハンドが構築可能です。また、生産を基本モジュールに絞ることで、大量生産による低価格化を目指します。
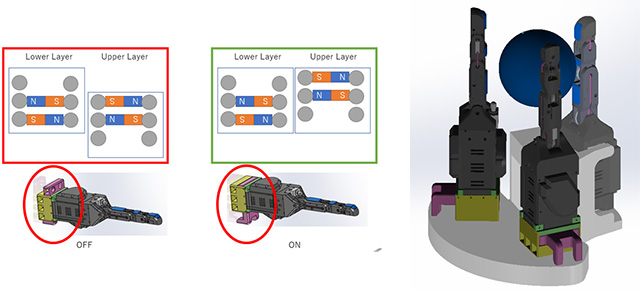
 フィンガーモジュール組替例
フィンガーモジュール組替例
本開発品の特長
- 1. 滑らかなフィンガーの動き
-
共同開発に基づき、ドイツ航空宇宙センターのワイヤ駆動技術を採用。多様な形状のものを優しく掴みます。
- 2. 簡単なレイアウト変更
-
NSKが独自に開発したマグネット式脱着メカニズムにより、フィンガーモジュールのレイアウト変更が簡単に行えます。
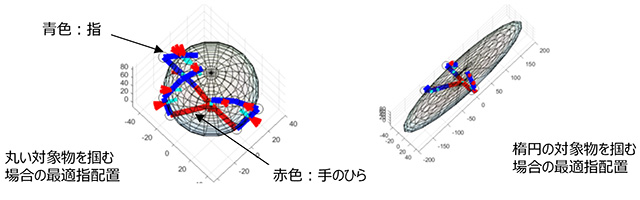
- 3. フィンガー配置の最適化
-
NSKのリアルデジタルツイン技術を活用し、対象物のサイズや形状に応じた指配置の最適化アルゴリズムを開発しました。
今後の予定
飲食業、小売業、製造業、物流業、農業などの幅広い業界の機械化・自動化に貢献するため、今後、サービスロボットSIer*2及び実際にロボットを使用されるユーザに対して提案を開始します。2024年度、実証実験を開始予定し、2026年度に販売開始を目指します。
*2 ITシステムの設計・開発・運用などを請け負う事業者のこと。
NSKについて
NSKは、1916年に日本で最初の軸受(ベアリング)を生産して以来、100年以上にわたり軸受や自動車部品、精機製品などのさまざまな革新的な製品・技術を生み出し、世界の産業の発展を支えてきました。1960年代初頭から海外に進出し、現在では約30ヶ国に拠点を設け、軸受の分野で世界第3位、また、ボールねじ、電動パワーステアリングなどにおいても世界をリードしています。
企業理念として、MOTION & CONTROL™を通じて円滑で安全な社会に貢献し、地球環境の保全をめざすとともに、グローバルな活動によって、国を越えた人と人の結びつきを強めることを掲げています。2026年に向けてNSKビジョン2026「あたらしい動きをつくる。」を掲げ、世の中の期待に応える価値を協創し、社会への貢献と企業の発展の両立を目指していきます。
