- 協働ロボットに「あたらしい動き」を提案。
- 高精度な衝突検出を可能にし、安心・安全なロボットの実現へ。
日本精工株式会社(以下、NSK)は横浜国立大学(神奈川県横浜市)と共同で、高精度な検出により人やモノとの衝突力を緩和する「協働ロボット用アクチュエータ」を開発しました。
NSKは、本開発品を3月9日(水)~3月12日(土)に東京ビッグサイト(東京都江東区)で開催される「2022国際ロボット展(iREX2022)」に参考出展いたします。協働ロボットメーカーや、それらの導入を試みているユーザー様に対して提案を開始し、実証試験など販売準備を進めていきます。
開発の背景
より円滑で豊かな社会の実現に向け、サービスロボット市場の成長が期待されています。近年、人手不足の解消や新型コロナウイルス感染症対策による省人化などの観点から、生産ラインへの協働ロボットの導入が進んでいます。一方で、人と同じ空間で一緒に作業を行う協働ロボットの、更なる普及には、人やモノとの衝突時の衝突力緩和など、より安心・安全性が求められています。NSKは、横浜国立大学 藤本研究室と共同で高精度な衝突検出を可能にする協働ロボット用アクチュエータを開発しました。
開発品の特長
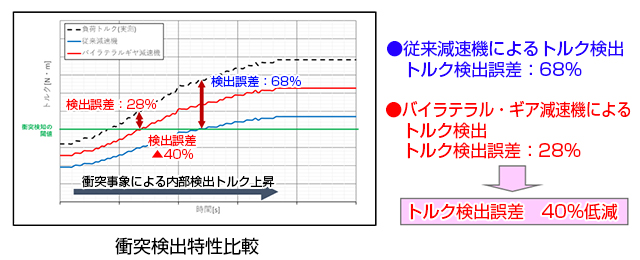
本開発品は、横浜国立大学 藤本教授が発明した高い逆作動効率を持つバイラテラル・ギアを搭載することにより、逆作動効率を20%(従来比)向上しました。これにより、ロボットアームが人と衝突した際の負荷トルクを高精度で検出し、モータ制御することで、人とロボットが衝突した際の衝突力緩和を実現します。
また、今回NSKが開発したアクチュエータ自身で衝突を検出するため、従来の協働ロボットに必要な検出用のセンサや配線の必要がありません。
今後本開発品は高精度な負荷トルク検出が必要とされるパワーアシストロボット、医療ロボット、自走ロボット(車輪スリップ検出)など幅広い用途への適用が期待されています。
NSKは今後もMotion & Control技術によって、円滑で安全な社会に貢献していきます。
NSKについて
NSKは、1916年に日本で最初の軸受(ベアリング)を生産して以来、100年にわたり軸受や自動車部品、精機製品などのさまざまな革新的な製品・技術を生み出し、世界の産業の発展を支えてきました。1960年代初頭から海外に進出し、現在では30ヶ国に拠点を設け、軸受の分野で世界第3位、また電動パワーステアリング、ボールねじなどにおいても世界をリードしています。
企業理念として、MOTION & CONTROL™を通じて円滑で安全な社会に貢献し、地球環境の保全をめざすとともに、グローバルな活動によって、国を越えた人と人の結びつきを強めることを掲げています。2026年に向けてNSKビジョン2026「あたらしい動きをつくる。」を掲げ、世の中の期待に応える価値を協創し、社会への貢献と企業の発展の両立を目指していきます。
