NSKは、「近接覚センサ技術」と「リアルタイム円錐走査センサ技術」の2種類のセンサ技術を開発しました。NSKはヒューマンアシストロボット向けセンサ技術の開発を通じて、ヒューマンアシストテクノロジーの発展と円滑で安全な社会に貢献します。
ヒューマンアシストロボットは、常に人間と近くで行動することが求められるため、非常に高い安全性が要求されます。このため、NSKは、不意の障害物に対する緊急回避を可能にするセンサ技術として電気通信大学 知能機械工学科の下条誠教授と「近接覚センサ技術」を共同開発しました。また、進路の状態を把握するセンサ技術として電気通信大学 知能機械工学科の金森哉吏(かなもり・ちさと)准教授と「リアルタイム円錐走査センサ技術」を共同開発しました。NSKは「2009国際ロボット展」にこれらの新技術を出展し、両センサ技術の活用を提案することで、市場での潜在的なニーズを探ります。
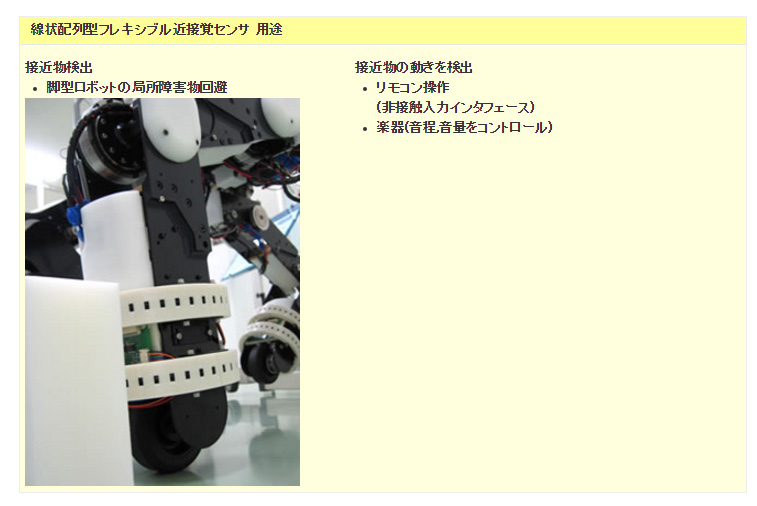
「近接覚センサ技術」
LED光を照射し、その反射光を受光することで、前方の対象物の有無や物体との距離を検出する素子を線状に多数配置し、対象物との距離とその中心位置をリアルタイムに取得します。NSKは、本技術をヒューマンアシストロボットの障害物回避用途として開発しました。本センサの特長は、少ない配線で多数のセンサ素子の情報を得ることができ、緊急回避のために応答時間が1ms(1000分の1秒)以下の検出速度を実現しました。また、取り付け基板を柔軟材質にすることでフレキシブル性を付与することも可能としました。
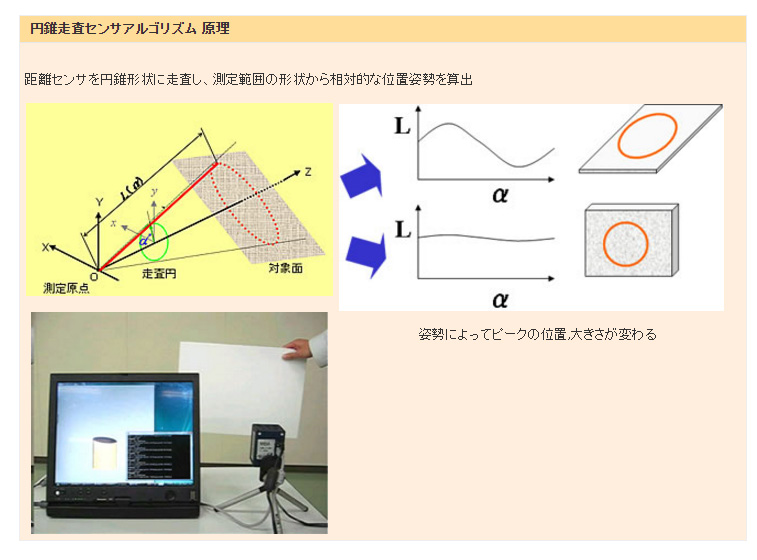
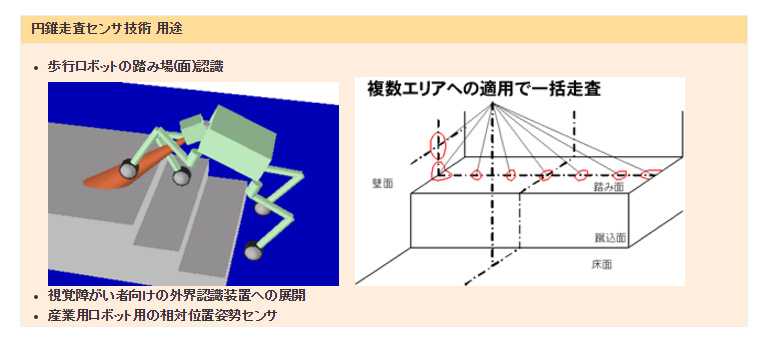
「リアルタイム円錐走査センサ技術」
距離センサを円錐形状に走査し、対象物までの距離と走査角度から対象面の位置と姿勢を算出します。本技術は、ロボットの進行方向の路面形状と傾斜を認識し、ロボットの姿勢制御にフィードバックすることで、安全な移動を可能とします。本技術の特長は、円錐形状でセンシングし、その情報を元に路面形状を高速で、リアルタイム処理を行うアルゴリズム(演算手法)にあります。
開発の背景
21世紀は「ライフサイエンスの時代」ともいわれ、人がより良く生きるための技術開発が重要視されています。その代表とも言えるロボット技術は、他分野(IT、自動化技術)などとの融合によって近年急速に発展し、私たちの生活にも様々な形で浸透しつつあります。この様なロボット技術の発展に対して、これまでNSKは、軸受やNSKリニアガイド、ボールねじなどの供給を通じて携わってきました。今回、ライフサイエンスに密着した同分野の発展にさらに踏み込んだ貢献を目指して、ヒューマンアシストロボットの研究開発に取り組んでおります。
NSKは、トライボロジー、材料、解析、メカトロの4つのコアテクノロジーを活かすことで、これからもヒューマンアシストロボット技術の開発を目指してまいります。