NSKは、障害物を回避し、人が進みたい方向へ案内するヒューマンアシストガイダンスロボットを開発しました。
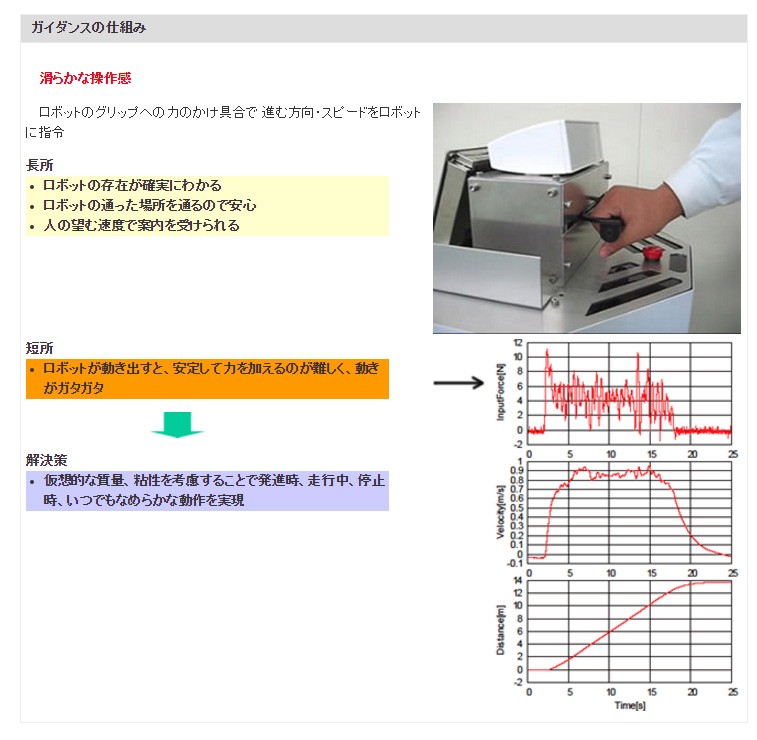
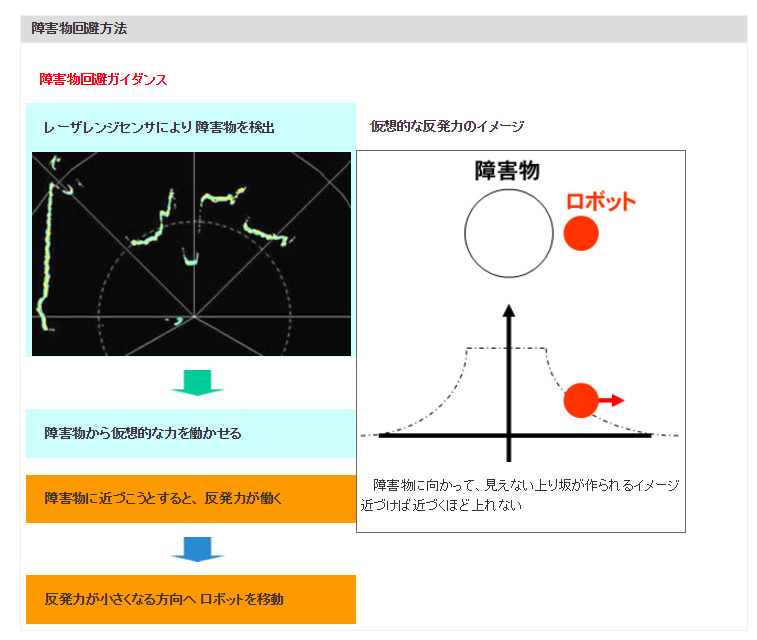
今回、NSKが開発したロボットは、平地や傾斜面、多少の凹凸面での移動が可能な車輪型移動ロボットであり、グリップを介して人の行きたい方向を察知し、進路上にある障害物を自律認識して回避しながら進みます。ロボットの駆動技術、認識技術及びロボットと人間との間の情報伝達(インターフェース)技術を組み合わせ、統合することで実現しました。この技術は将来的に、車椅子、盲導犬や介護犬の代用などへの応用が可能な、人間をアシストする自律移動ロボットへと繋がるものです。
本製品は、11月25日より東京ビックサイト(東京都江東区)で開催される「国際ロボット展2009」に出展いたします。
21世紀は「ライフサイエンスの時代」ともいわれ、人がより良く生きるための技術開発が重要視されています。その代表とも言えるロボット技術は、他分野(IT、自動化技術)などとの融合によって近年急速に発展し、私たちの生活にも様々な形で浸透しつつあります。
NSKは、これまで軸受やNSKリニアガイド、ボールねじなどの供給を通じてロボット技術に携わってきました。そして、このような機械要素部品での経験を通じ、ライフサイエンスに密着した同分野の発展にさらに踏み込んだ貢献ができないか、ということを模索する中での一つの試みとして、ヒューマンアシストロボットに取り組んでいます。
NSKは、これからもヒューマンアシストを目指したロボットの開発を通じて、この分野における潜在的な課題をいち早く捉え、NSKの持つトライボロジー、材料、解析、メカトロの4つのコアテクノロジーを活かすことで、ヒューマンアシストテクノロジーの発展に貢献していきます。