NSKは、画像センサと距離センサを複合した新開発の認識技術を搭載し、自律的に姿勢を修正しながら階段を昇降するという、他に例を見ない特長を有する四脚車輪型ロボットを開発しました。
Global
ASEAN and Oceania
Middle East
Africa
プレスリリース
2007年10月02日
日本精工株式会社 CSR本部 広報部
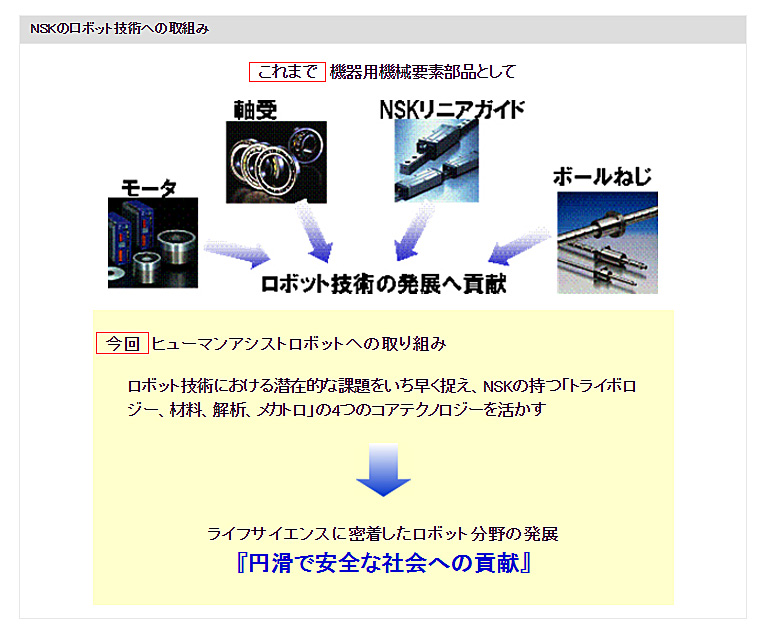
ヒューマンアシストを目指したロボットを開発
~ 世界初*1、階段を自己認識し、自律的に昇降可能な四脚車輪型ロボット ~
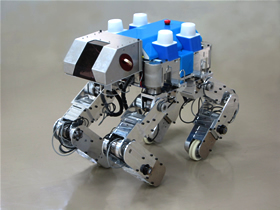
NSKが今回開発したロボットは、平地や段差での高い移動能力を有する、脚先に駆動車輪を設けた四脚の脚車輪型ロボットであり、車椅子、盲導犬や介護犬の代用などへの応用が可能な、人間をアシストする自律移動ロボットへと繋がる技術開発を目的としたものです。 これは、単に平地や段差におけるロボットの駆動技術だけでなく、認識技術と組み合わせた統合的なメカトロ技術により実現しました。
本ロボットの開発は、電気通信大学 知能機械工学科の下条誠教授、金森 哉吏(かなもり ちさと)准教授と共同で進めており、9月14日に第25回ロボット学会学術講演会において発表いたしました。
*1:2007年9月14日現在 NSK調べ
【開発品の特長】
- ◆階段を形状として認識し、自律的に昇降可能
- 画像センサと距離センサを複合した新開発の認識技術により、特別なランドマークを必要とせずに階段などの段差を認識し、自律的に階段を昇降します。
- ◆安定した歩行動作
- 脚リンクに力センサを内蔵した新開発の接地検出機構により、安定した歩行動作を実現しています。
- ◆脚と車輪のハイブリッド構造
- 歩行動作による階段の昇降動作に加え、平地では車輪を用いて円滑に走行します。
【開発の背景】
21世紀は「ライフサイエンスの時代」ともいわれ、人がより良く生きるための技術開発が重要視されています。その代表とも言えるロボット技術は、近年急速に発展し、私たちの生活にも様々な形で浸透しつつあります。
NSKは、軸受やNSKリニアガイド、ボールねじなどのロボットに使用される機械要素部品での経験を通じ、ライフサイエンスに密着した同分野の発展にさらに踏み込んだ貢献ができないか、ということを模索する中での一つの答えが、今回のヒューマンアシストロボットへの取り組みです。
NSKは、これからもこの分野における潜在的な課題をいち早く捉え、NSKの持つトライボロジー、材料、解析、メカトロの4つのコアテクノロジーを活かすことで、ヒューマンアシストテクノロジーの発展に貢献してまいります。